........
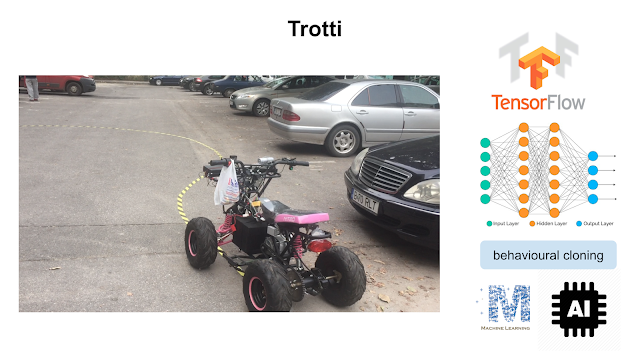
Proof of concept I have developed with my Robofun team. We enhanced an electric ATV with cameras and sensors, then trained a neural network to control it in a factory environment.
Proof of concept I have developed with my Robofun team. We enhanced an electric ATV with cameras and sensors, then trained a neural network to control it in a factory environment.